







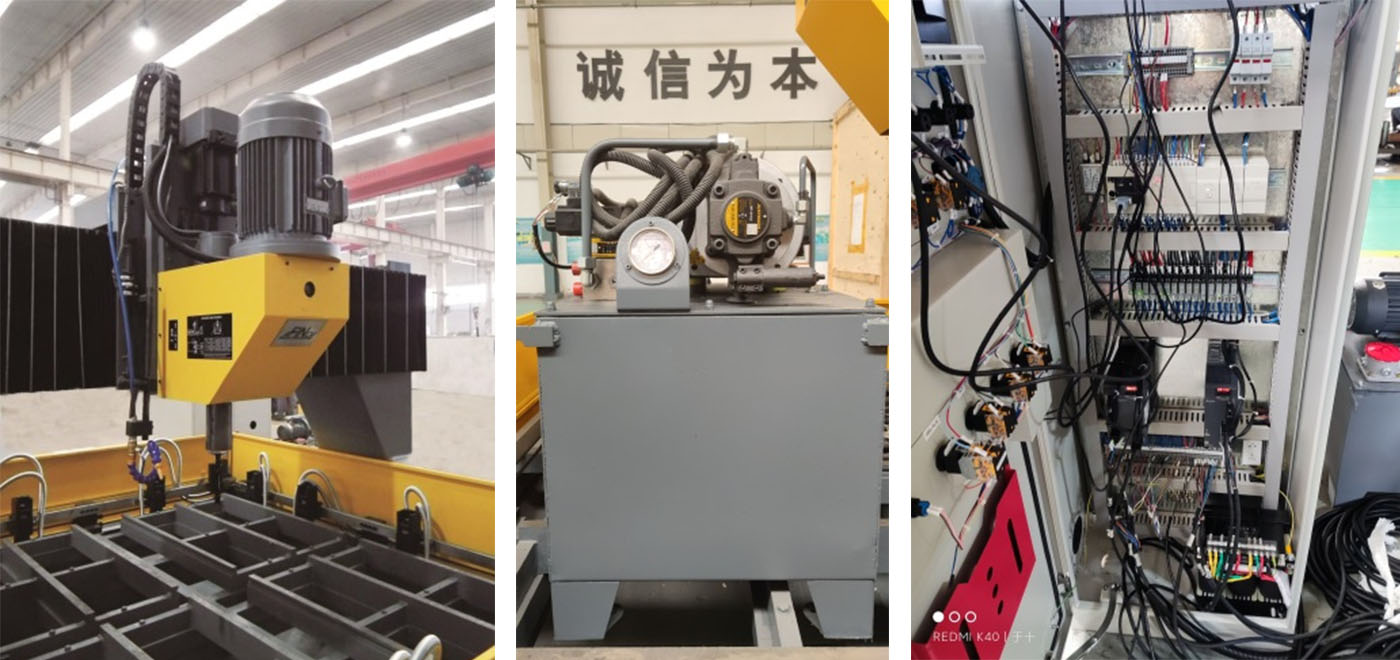
Perforadora CNC mòbil de pòrtic PLD3030A i PLD4030




| Inom del tema | Paràmetre | ||
| PLD3030A | PLD4030 | ||
| Mecanitzat màximplatmida | Llargada x Amplada | 3000x3000 mm | 4000 * 3000 mm |
| Gruix | 200 mm | 100 mm | |
| Treballtaula | Dimensió de l'amplada de la ranura en T | 22 mm | |
| Capçal de perforació | Qquantitat | 2 | 1 |
| Perforació màximaforatdiàmetre | Φ12mm-Φ50mm | ||
| RPM(conversió de freqüència) | 120-450 r/min | ||
| Con Morse del fus | NÚM. 4 | ||
| Potència del motor del fus | 2x7,5 kW | 5,5 kW | |
| Distància des de la cara inferior defusa la taula de treball | 200-550 mm | ||
| Moviment longitudinal del pòrtic (X-eix) | Desplaçament de l'eix X | 3000 mm | |
| Velocitat de moviment de l'eix X | 0-8 m/min | ||
| Potència del servomotor de l'eix X | 2x2,0 kW | ||
| Precisió de posicionament de l'eix X | 0,1 mm/Sencer | ||
| Moviment lateral del capçal de potència (Eix Y) | Distància màxima entre dos capçals de potència de l'eix Y | 3000 mm | |
| Distància mínima entre dos capçals de potència de l'eix Y | 470 mm | ||
| Potència del servomotor de l'eix Y | 1,5 kW | ||
| Moviment d'alimentació del capçal de potència | Desplaçament de l'eix Z | 350 mm | |
| Potència del servomotor de l'eix Z | 2*2KW | ||
| Transportador de xips i refrigeració | Potència del motor del transportador de xips | 0,75 kW | |
| Potència del motor de la bomba de refrigeració | 0,45 kW | ||
| Esistema elèctric | Potència total del motor | Uns 30 kW | Sobre20 kW |
| Dimensions totals de la màquina-eina | Aproximadament 6970x6035x2990 mm | ||
1. El diàmetre màxim de perforació de la màquina-eina és de 50 mm, el gruix màxim de la placa de perforació és de 200 mm i la mida màxima de la placa és de 3000 x 3000 mm.
2. La màquina-eina està equipada amb dos capçals de perforació amb lliscament d'alimentació servo independents.
3. La posició de coordenades del forat es pot posicionar ràpidament a una velocitat de 8 m/min, i el temps auxiliar és relativament curt.
4. El motor del cargol del capçal de perforació adopta una regulació de velocitat de conversió de freqüència continua i la velocitat d'alimentació adopta una regulació de velocitat servo continua, que és convenient d'operar.
5. Després de configurar la cursa d'alimentació de la perforació, té la funció de control automàtic.
6. El forat cònic del cargol és Morse núm. 4 i està equipat amb un màniga reductor Morse núm. 4/3, que pot instal·lar broques amb diferents diàmetres.
7. S'adopta l'estructura mòbil de pòrtic, la màquina cobreix una àrea petita i la disposició estructural és raonable.

8. El moviment de l'eix X del pòrtic adopta una guia de parells de carrils guia lineals d'alta capacitat de suport, que és flexible.
9. La màquina està equipada amb un dispositiu de fixació d'eines de centre de ressort, que pot identificar fàcilment la posició de la placa.
10. El sistema de control adopta el programari de programació informàtica superior desenvolupat independentment per la nostra empresa i combinat amb un controlador programable PLC, amb un alt grau d'automatització.
11. El carril guia de la màquina i la femella del cargol de plom estan equipats amb un dispositiu de lubricació automàtica.
12. El carril guia de l'eix X adopta una coberta protectora telescòpica d'acer inoxidable, els dos costats del carril guia de l'eix Y adopten una coberta protectora flexible i s'afegeix un deflector impermeable al voltant de la taula de treball.
| NO. | Nom | Marca | País |
| 1 | Lcarril guia intraauricular | HIWIN/PMI | Taiwan, Xina |
| 2 | Servoconductor | Mitsubishi | Japó |
| 3 | Smotor erràtic | Mitsubishi | Japó |
| 4 | Controlador programable | Mitsubishi | Japó |
| 5 | Dispositiu de lubricació automàtica | BIJUR/HERG | EUA / Japó |
| 6 | Cordinador | Lenovo | Xina |
Nota: L'anterior és el nostre proveïdor estàndard. Està subjecte a ser substituït per components de la mateixa qualitat d'una altra marca si el proveïdor anterior no pot subministrar els components en cas de qualsevol problema especial.



Perfil breu de l'empresa  Informació de la fàbrica
Informació de la fàbrica  Capacitat de producció anual
Capacitat de producció anual  Capacitat comercial
Capacitat comercial 
Categories de productes
-

Màquina de perforació d'alta velocitat CNC PHD3016 i PHD4030...
-

Document tècnic del PDDL2016 Tipus Intel·ligent...
-

Perforadora CNC d'alta velocitat PHD1616S per a...
-

Trepant CNC PHD2020C per a plaques d'acer
-

PD16C Trepant de plaques CNC mòbil de doble taula Gantry...
-

Màquina de perforació de plaques CNC mòbil de pòrtic PLD3016